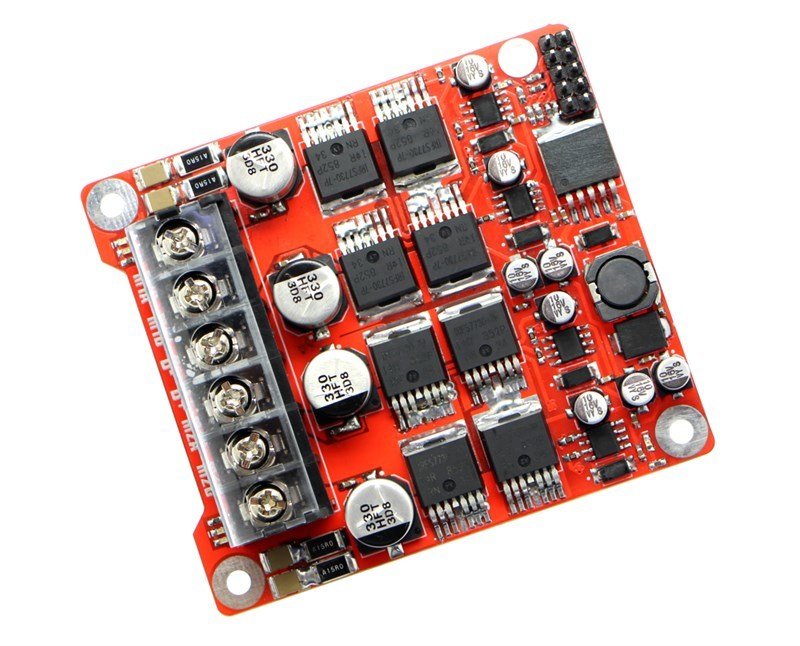








RedHill Dual Motor Driver Board 12V-50V x 185A
Conductor Dual RedHill Motor Junta 12V-50V x 185A.
Conductor RedHill doble motor diseñado por nuestro equipo de alta potencia de cepillado DC motor con capacidad de corriente de hasta 90A y 185A pico continuamente S pecialized Por Mega Robot Sumo.
Hay 2 controlador de motor de puente en H integrado en el tablero. Con este circuito, se puede utilizar fácilmente con motores de alto voltaje y la corriente.
En sus proyectos de robótica (robot de sumo, robot terreno, robot de Reconocimiento de Marte, etc.), puede utilizar el circuito que se puede utilizar en su I + D trabaja con microcontrolador, Arduino y todas las tarjetas de desarrollo.
Precaución ! : Protección contra polaridad inversa en ninguna fuente de alimentación Por favor! Compruebe sus tiempos de conexión doble.

Especificaciones técnicas:
Dos de control de dirección para 2 cepillado motor de corriente continua.
Voltaje mínimo de funcionamiento: 12V (3 celdas de la batería)
De tensión máxima de funcionamiento: 50V (12 celdas de la batería)
Salida de corriente continua: 90A
Pico de corriente en la salida: 185 A
La frecuencia PWM máxima: 32 kHz
Dimensiones: 80 x 70 cm
Peso: 60 gramos
| Tablas de verdad | |||
| mx PWM1 | mx PWM2 | Habilitar MX | salida mx |
| ALTO | BAJO | ALTO | ADELANTE |
| BAJO | ALTO | ALTO | HACIA ATRÁS |
| ALTO | ALTO | ALTO | FRENO |
| BAJO | BAJO | ALTO | FRENO |
| X | X | BAJO | DORMIR |


int m1En = 2; // motores conjunto pines como una variable a los pines int m1PWM1 = 5; int m1PWM2 = 6; int m2En = 7; int m2PWM1 = 9; int m2PWM2 = 10; void setup () { pinMode (m1PWM1, OUTPUT); // inicialización necesaria pines digitales como una salida. pinMode (m1PWM2, OUTPUT); pinMode (m1En, OUTPUT); pinMode (m2PWM1, OUTPUT); pinMode (m2PWM2, OUTPUT); pinMode (m2En, OUTPUT); digitalWrite (m2En, LOW); // motor parada m2, haciendo que el pasador de baja tensión m2Enable digitalWrite (m1En, LOW); // parada del motor M1, haciendo que el pasador de baja tensión m1Enable analogWrite (m1PWM1,0); analogWrite (m1PWM2,0); analogWrite (m2PWM1,0); analogWrite (m2PWM2,0); retardo (5000); // espera durante 5 segundos } void loop () { // Adelante digitalWrite (m1En, HIGH); // iniciar el motor M1, haciendo que el pasador de alto voltaje m1Enable digitalWrite (m2En, HIGH); // iniciar motor M2, haciendo que el pasador de alto voltaje m2Enable analogWrite (m1PWM1, 245); // establecer el valor de salida analógica para M1 toda velocidad vuelta hacia la derecha analogWrite (m1PWM2, 2); // establecer el valor de salida analógica para M1 toda velocidad vuelta hacia la derecha analogWrite (m2PWM1, 245); // establecer el valor de salida analógica para M1 toda velocidad vuelta hacia la derecha analogWrite (m2PWM2, 2); // establecer el valor de salida analógica para M1 toda velocidad vuelta hacia la derecha retardo (2000); // espera durante 2 segundos // Backward digitalWrite (m1En, HIGH); // iniciar el motor M1, haciendo que el pasador de alto voltaje m1Enable digitalWrite (m2En, HIGH); // iniciar motor M2, haciendo que el pasador de alto voltaje m2Enable analogWrite (m1PWM1,2); // establecer el valor de salida analógica para M1 a su vez en sentido contrario a toda velocidad analogWrite (m1PWM2,245); // establecer el valor de salida analógica para M1 a su vez en sentido contrario a toda velocidad analogWrite (m2PWM1,2); // establecer el valor analógico a cabo por m2 a su vez en sentido contrario a toda velocidad analogWrite (m2PWM2,245); // establecer el valor analógico a cabo por m2 a su vez en sentido contrario a toda velocidad retardo (2000); // espera durante 2 segundos } |