

Arduino Cnc Shield
4,00 USD
Categoría
Código de producto
672
Precio
4,00 USD
* Disponible en todo el mundo envío
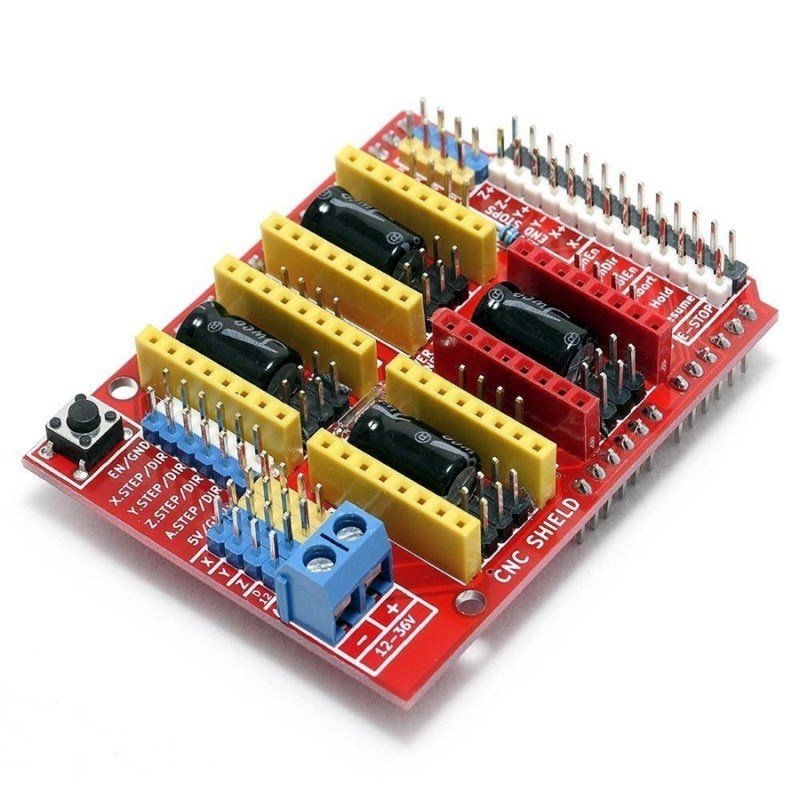
Arduino CNC Escudo manera fácil de hacer CNC ROUTER
Esta tarjeta de expansión como una tarjeta de expansión conductor, se puede utilizar para máquinas de grabado, impresoras 3D.
Se trata de un total de cuatro ranuras, puede conducir cuatro A4988 motor paso a paso. Cada carretera motores paso a paso sólo se necesitan dos puertos IO. En otras palabras, seis puertos IO pueden ser bien manejados tres motores paso a paso. Muy cómodo de usar.
UNO para el módulo Arduino introducción puerto IO correspondencia.
IO cifra correspondiente anteriormente
UNO para Arduino ---------------------- tarjeta de expansión
8 ------------------------ ES (controlador de motor paso a paso permitir, bajo activo)
7 ----------------------- Z.DIR (control de la dirección Z eje x)
6 ----------------------- Y.DIR (eje y de control de dirección)
5 ----------------------- X.DIR (eje x de control de dirección)
4 ---------------------- Z.STEP (Z eje x de control paso a paso)
3 ---------------------- Y.STEP (eje y de control paso a paso)
2 ---------------------- X.STEP (eje x stepper control)
/ / El siguiente es un procedimientos de control de motor paso a paso sencillo,
# Definir habilitar ES 8 / motor / paso a paso, bajo activo
# Definir X_DIR de control de dirección 5 / / eje x motor paso a paso
# Definir Y_DIR 6 / / eje y paso a paso de control de la dirección del motor
# Definir Z_DIR 7 / / z de control de ejes paso a paso la dirección del motor
# Definir X_STP 2 / / eje x de control paso a paso
# Definir Y_STP 3 / / del eje y de control paso a paso
# Definir Z_STP 4 / / z eje x de control paso a paso
/ *
/ / Función: paso. Función: para controlar la dirección del motor paso a paso, el número de pasos.
/ / Parámetros: control de la dirección dir, dirPin motor paso a paso pin DIR correspondientes, stepperPin motor paso a paso pin "paso", número de paso de la etapa de ningún valor de retorno correspondiente.
* /
void paso (dir boolean, byte dirPin, byte stepperPin, pasos INT)
{
digitalWrite (dirPin, dir);
de retardo (50);
for (int i = 0; i digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {/ / El motor paso a paso utilizado en el pin IO se establece en la salida
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
la etapa (falso, X_DIR, X_STP, 200); / / X motor eje inversa 1 anillo, el paso 200 es un círculo.
la etapa (falso, Y_DIR, Y_STP, 200); / / Motor y eje inversa 1 anillo, el paso 200 es un círculo.
la etapa (falso, Z_DIR, Z_STP, 200); / / Z motor eje inversa 1 anillo, el paso 200 es un círculo.
retardo (1000);
paso (true, X_DIR, X_STP, 200); / / X motor del eje delantero 1 vueltas, la etapa 200 es un círculo.
paso (true, Y_DIR, Y_STP, 200); / / Y motor del eje delantero 1 vueltas, la etapa 200 es un círculo.
paso (true, Z_DIR, Z_STP, 200); / / Z eje motor hacia adelante 1 vueltas, la etapa 200 es un círculo.
retardo (1000);
}
Nota: Al insertar el módulo A4988, no deberá ser cuidadoso para inserción opuesta. el cableado del motor paso a paso de la siguiente manera:
2A, 2B es un grupo (rojo, verde), 1A, 1B es un grupo (azul, amarillo), si quiera cambiar de dirección, se puede cambiar la posición de un grupo, por ejemplo 2A, 2B mutuamente intercambiada.
UNO para Arduino ---------------------- tarjeta de expansión
8 ------------------------ ES (controlador de motor paso a paso permitir, bajo activo)
7 ----------------------- Z.DIR (control de la dirección Z eje x)
6 ----------------------- Y.DIR (eje y de control de dirección)
5 ----------------------- X.DIR (eje x de control de dirección)
4 ---------------------- Z.STEP (Z eje x de control paso a paso)
3 ---------------------- Y.STEP (eje y de control paso a paso)
2 ---------------------- X.STEP (eje x stepper control)
/ / El siguiente es un procedimientos de control de motor paso a paso sencillo,
# Definir habilitar ES 8 / motor / paso a paso, bajo activo
# Definir X_DIR de control de dirección 5 / / eje x motor paso a paso
# Definir Y_DIR 6 / / eje y paso a paso de control de la dirección del motor
# Definir Z_DIR 7 / / z de control de ejes paso a paso la dirección del motor
# Definir X_STP 2 / / eje x de control paso a paso
# Definir Y_STP 3 / / del eje y de control paso a paso
# Definir Z_STP 4 / / z eje x de control paso a paso
/ *
/ / Función: paso. Función: para controlar la dirección del motor paso a paso, el número de pasos.
/ / Parámetros: control de la dirección dir, dirPin motor paso a paso pin DIR correspondientes, stepperPin motor paso a paso pin "paso", número de paso de la etapa de ningún valor de retorno correspondiente.
* /
void paso (dir boolean, byte dirPin, byte stepperPin, pasos INT)
{
digitalWrite (dirPin, dir);
de retardo (50);
for (int i = 0; i
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {/ / El motor paso a paso utilizado en el pin IO se establece en la salida
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
la etapa (falso, X_DIR, X_STP, 200); / / X motor eje inversa 1 anillo, el paso 200 es un círculo.
la etapa (falso, Y_DIR, Y_STP, 200); / / Motor y eje inversa 1 anillo, el paso 200 es un círculo.
la etapa (falso, Z_DIR, Z_STP, 200); / / Z motor eje inversa 1 anillo, el paso 200 es un círculo.
retardo (1000);
paso (true, X_DIR, X_STP, 200); / / X motor del eje delantero 1 vueltas, la etapa 200 es un círculo.
paso (true, Y_DIR, Y_STP, 200); / / Y motor del eje delantero 1 vueltas, la etapa 200 es un círculo.
paso (true, Z_DIR, Z_STP, 200); / / Z eje motor hacia adelante 1 vueltas, la etapa 200 es un círculo.
retardo (1000);
}
Nota: Al insertar el módulo A4988, no deberá ser cuidadoso para inserción opuesta. el cableado del motor paso a paso de la siguiente manera:
2A, 2B es un grupo (rojo, verde), 1A, 1B es un grupo (azul, amarillo), si quiera cambiar de dirección, se puede cambiar la posición de un grupo, por ejemplo 2A, 2B mutuamente intercambiada.
¡Sé el primero en comentar sobre este producto!